-
Utilisation du module motorisation
Mercredi 23 Août 2017 à 20:27 Franck.A

Au préalable, la modélisation aérodynamique (géométrie, profil(s), masse(s) et réglages) du modèle a été renseignée :


Voilà qui détonne un peu des calculateurs de motorisation classiques, comme eCalc, DriveCalc Scorpion Calc, etc., qui se focalisent sur la simulation de la motorisation et ne tiennent pas compte, ou très peu, de l'appareil à motoriser.
Rien de plus normal, car les objectifs ne sont pas les mêmes :
- les calculateurs classiques simulent la motorisation en tant que telle, indépendamment du modèle, et en condition statique (au sol) uniquement. On connecte tel moteur avec telle batterie et telle hélice, et le logiciel calcule le régime moteur, la traction statique, et l'intensité consommée. Autrement dit, ces logiciels délivrent des mesures en banc d'essai virtuel, que l'on peut corréler au sol avec un compte-tour et un wattmètre, mais on n'apprend rien sur ce qui se passera en vol.
- a contrario, PredimRC a pour objectif de simuler la motorisation en situation réelle d'utilisation, afin de vérifier ou optimiser l'adaptation de l'une (motorisation) à l'autre (modèle). Prenez par exemple un planeur hotliner et un avion de début électrique, on se doute bien que la motorisation à utiliser sera très différente, et cela même s'ils sont de même masse ou surface. PredimRC va donc déterminer, en plus de la condition statique, comment évoluent en vol, d'un côté le régime moteur et la traction d'hélice, de l'autre la traînée aérodynamique de l'appareil à motoriser, avec au croisement de ces informations le domaine de vol au moteur.Il faut donc voir ces outils comme complémentaires, par exemple en utilisant les données statiques des calculateurs moteur dans PredimRC (voir ci-après).
Dans l'onglet "motorisation", la modélisation aérodynamique se traduit par la courbe, fonction de la vitesse de vol en palier, de la traînée ou de la puissance aéro consommée du modèle (généralement, travailler en termes de force est plus intuitif, mais les résultats sont les mêmes dans les deux cas) :

Par défaut ces courbes sont calculées en vol rectiligne, mais il est aussi possible de simuler un virage en choisissant une inclinaison des ailes non nulle (sélecteur en haut à droite des graphiques).
Avant de poursuivre : cocher « GMP connu » ou « Détermination GMP », suivant que l’on a déjà choisi une motorisation (pour simplement vérifier ce qu’elle donnera) ou qu’on l’on souhaite dimensionner au mieux la motorisation à utiliser en fonction de son besoin.
Ne pas oublier non plus de sélectionner le nombre de GMP, de 1 (par défaut) à 8.Premier cas de figure : la motorisation est choisie et ses performances statiques (régime avec l’hélice et l'accu sélectionnés) sont déjà connues.
Le régime avec hélice (au sol) peut être donné par le constructeur du moteur, mesuré sur banc d’essai ou extrait d’un simulateur de motorisation, tandis que celui à vide est soit donnée par le constructeur (moteur thermique) soit déterminé par un calcul simple (moteur électrique : Nmax = KV * tension accu).

Après avoir renseigné les dimensions et le type de pale de l'hélice (voir commentaire d'aide), on obtient ainsi les renseignements chiffrés suivants :
- traction statique hélice (au sol), ici 1369 gf (gramme-force).
- pas réel de l’hélice, ici 6.25" (celui qui donne le vrai "Vpitch"), contre un pas constructeur de 5" (qui est un pas apparent, ou géométrique, c’est-à-dire le calage du profil d’hélice).L'enveloppe de vol en palier est ainsi matérialisée graphiquement (interprétation détaillée ici et ici) :

On obtient les éléments suivants :
- traction hélice en vol en fonction de la vitesse de vol (courbe en magenta).
- vitesse de vol en palier plein gaz : intersection (à droite) entre la traction d'hélice et la traînée du modèle, ici 98 km/h.
- vitesse de vol minimale au moteur (second régime) : intersection (à gauche), ici 25 km/h.
- entre ces deux points se trouve la réserve de traction (ou de puissance) moteur, c.a.d. le domaine de vol où il faut moduler la puissance moteur pour rester en palier à ces vitesses intermédiaires, et donc où la mise plein gaz permet de relancer l'appareil.Pour les curieux, voici une synthèse de Guillaume Rouby concernant la modélisation des hélices en vol dans PredimRC : http://aerotrash.over-blog.com/article-predimrc-et-ses-helices-123711974.html
Un clic sur le bouton « Calcul » permet d’étudier le vol en montée (plein gaz, évidemment) :
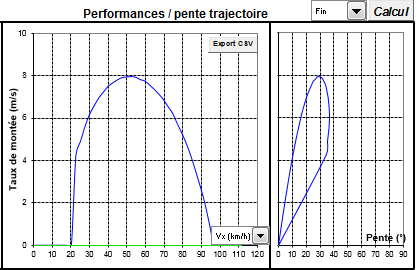
On peut y lire :
- en fonction de la vitesse de vol (ou de la vitesse sur trajectoire), le taux de montée (à gauche) et la pente associée (à droite, à lire depuis le graphique de gauche).
- par exemple, à 80 km/h, le taux de monté est de 5.2 m/s et la pente de montée associée est de 15°.
- le second régime de montée à 5.2 m/s s'obtient à 37° et 27 km/h, mais est nettement moins confortable que le premier car situé sur une zone très évolutive de la courbe de montée : il suffit de cabrer à peine un peu plus le modèle pour le freiner sensiblement et dégrader le taux de montée.
- le taux de montée maximum, ici 8 m/s, et l'angle de montée associé, ici 30 °.Dans le cas d’une motorisation électrique, si on connait l’intensité au sol, PredimRc détermine l’évolution de l’intensité en vol, parallèlement à celle du régime moteur :

Cette courbe est particulièrement intéressante pour calculer l'autonomie réelle de vol. Pour cet exemple, à la vitesse maximale de palier déterminée ci-avant, 98 km/h, la consommation se situe à environ 39 A, contre 50 A au sol. On retrouve ici un ratio classique de 80% mais, suivant le pas de l'hélice, l'écart peut être bien plus faible comme bien plus important.
Second cas de figure : on ne connait pas a priori la motorisation à utiliser et il s'agit de la déterminer.
Première opération, il faut définir le résultat que l’on souhaite atteindre :
- Objectif de vol : plutôt rapide en palier ? taux de montée à privilégier ? autonomie ? etc.
- type d’utilisation du moteur : positionne l’intensité d’utilisation par rapport à l’intensité de rendement maximum du moteur, suivant qu’on privilégie la fiabilité (« gros » moteur peu chargé) ou la légèreté (« petit » moteur utilisé au maximum de ses possibilités).
- qualité du moteur : suivant ses moyens et l’objectif de masse. Pour un résultat donné, un moteur de «faible » qualité aura un rendement moins bon et sera donc plus lourd [pour fournir le travail attendu] qu’un moteur de meilleure qualité.
- contraintes : tension nominale et capacité d’accu (imposés par ex. par la place disponible dans le fuselage), taille d’hélice limitée (bimoteur), etc.Pour cet exemple, mettons que :
- s’agissant d’un moto-planeur, on souhaite privilégier le taux de montée.
- pour des raisons d’encombrement, on a choisi un accu 3S 2500 mA.h, que l’on souhaite exploiter au mieux mais sans compromettre sa durée de vie, par ex. autour de 20C pour un accu badgé 30C, soit 50A.
- le moteur est de qualité « moyenne » (gamme Turnigy AeroDrive par ex.) et est sollicité « normalement ».
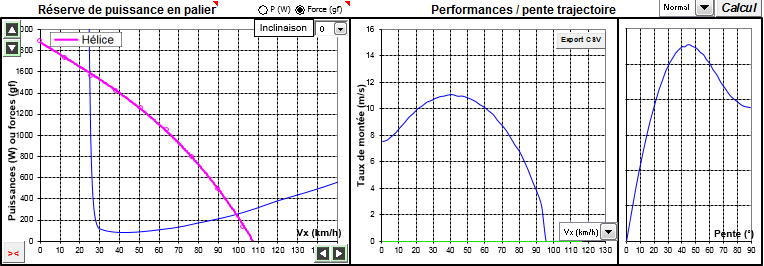
- l’hélice, à pales « normale » (type Graupner CamProp, Gemfan, APC-E), choisie a priori est une 10x4, car intuitivement on pense "grand diamètre + faible pas = traction importante". C’est vrai, mais seulement en statique, c’est-à-dire à vitesse de vol nulle… alors que c’est en vol que la traction importe.Observons les résultats, satisfaisants a priori :
Maintenant, utilisons une hélice 9x6 :

Et une 8x8 :
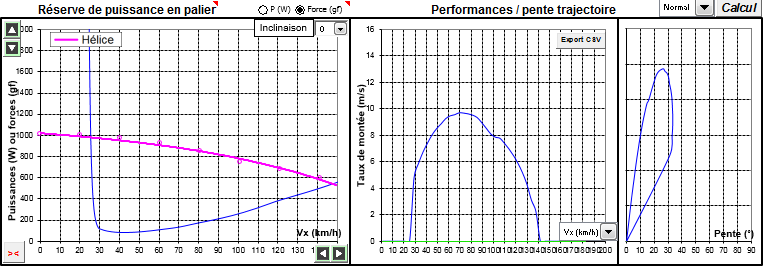
L'analyse comparative de ces simulations montre que :
- la 10x4 tire le plus fort au sol et permet de grimper à la verticale (à un taux de montée cependant inférieur à l'optimum).
- la 9x6 offre le meilleur taux de montée, mais la tolérance à l’angle de montée (autour de l’angle optimum) est un peu moindre que dans le cas de la 10x4.
- la 8x8 offre la meilleure vitesse maxi en palier.Nota : en visualisant les courbes en termes de puissances, au lieu de forces, on remarque aussi que, dans le cas présent, le meilleur rendement d’hélice en absolu est obtenu avec la 9x6, tandis que la 8x8 a le meilleur rendement à partir de 110 km/h. Dans tous les cas, le rendement est nul au sol car, sans vitesse d’avancement, il n’y a pas de travail fourni à l’avion.
Pour obtenir le résultat attendu (ici pour la 9x6) le moteur à utiliser doit avoir les caractéristiques suivantes :

Soit : KV 1595 et masse 124 g. Bien entendu, on n’est pas à trois chiffres significatifs près, un KV 1600 et une masse de 130 g conviendront parfaitement. Les valeurs de I0 et Ri sont aussi données, mais plus à titre indicatif qu'à des fins de sélection de moteur, la majorité des fabricants n'indiquant pas ces valeurs.
Nota : il est aussi possible d’utiliser ce module en connaissant la masse et le KV d’un moteur choisi a priori, il suffit d'ajuster l’intensité (pour l’hélice choisie) jusqu’à retrouver ces deux caractéristiques.
Cas particulier du torque-roll (vol pendu à l'hélice) :
On remarquera aussi que, dans le cas où la traction moteur est supérieure au poids du modèle, le graphique d’équilibre des forces ou puissances ne traduit pas le vol pendu à l'hélice, la modélisation montrant toujours une vitesse de second régime alors que physiquement cette vitesse n’existe pas dans ce cas de figure. La contradiction n'est qu'apparence et cela est tout à fait normal, car le calcul aérodynamique est basé sur le vol sustenté par les ailes et ne sait donc pas calculer la traînée et la puissance dissipée associée au-delà de l’incidence de décrochage. Ce qui se passe au-delà, c.a.d. entre le second régime et la vitesse nulle, relève du torque-roll.
Néanmoins, si en-dessous de la vitesse du second régime on raisonne en termes de force verticale à fournir (résidu de portance + poids projeté sur l'axe vertical) pour équilibrer le poids de l'avion, au lieu du raisonnement classique (traînée à équilibrer par la traction d'hélice dans un axe de vol horizontal) utilisé pour le reste du domaine de vol, on peut construire ce type de polaire qui cette fois simule bien le vol pendu à l'hélice au-delà de l'incidence de décrochage de l'aile (exemple précédent avec hélice 10x4 et masse modèle 1500 g) :
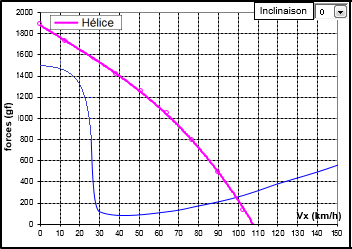
Cette modélisation peut être approximée simplement, en rapportant la masse de l’appareil (trait horizontal) et en faisant abstraction de la partie de la courbe de traînée située au-dessus) :

 Ce sujet est verrouillé. Vous ne pouvez donc pas poster de nouvelles réponses.
Ce sujet est verrouillé. Vous ne pouvez donc pas poster de nouvelles réponses.
|
|
|
|