-
Résolu utilisation module analyse dynamique
Lundi 4 Mai 2020 à 21:42 flip_Airboost

Bonsoir Franck,
Je viens de passer 12 heures sur ce module ;o).
Il y a un problème comme signalé sur les fenêtres réglages Marge statique et Cz aile équilibre.
Il faut entrer en manuel la marge statique ( les flèches ne fonctionnent pas).
J'ai déverrouillé la feuille, les flèche pour le Cz aile equilibre ne fonctionnent alors plus non plus et il faut entrer la donnée en manuel.
J'ai aussi eu la flèche verte calcul plomb centrage qui disparu, j'ai fermé puis relancé excel , elle est revenue !
Si l'on connait le centrage actuel du modèle , on peu affiner le moment d'inertie sans modeleur en travaillant sur les longueurs du fuselage et aile et toutes les masses non concentrées pour amener le plomb presque à zéro à cette position connue du CG.
J'ai essayé pour un Bird of Time que j'ai motorisé d'optimiser une montée sur une trajectoire stable sans pilotage.
En restant du coté du premier régime qui est en principe stable sans piloter le moteur. Je n'ai pas réussi à obtenir une trajectoire correcte ( sans looping ou décrochage a l'endroit ou j'ai la plus grande reserve de puissance .)
Voici les captures d'écran pour différentes marge statique.
MS 0% c'est tout droit mais quid si le planeur rencontre une turbulence?

MS 2% décrochage après 47 secondes.

MS 5%. C'est assez stable mais ça ne s'amorti pas .

Ms 8% . C'est plus stable mais ça ne s'amorti pas non plus?!


Cordialement,
Philippe
Mardi 5 Mai 2020 à 11:02 Franck.A

Bonjour Philippe,
Je n'ai pas réussi à reproduire (sur Excel 2000 et 2013) le bug que tu décris pour les boutons de modification du Cz d'équilibre et de la marge statique :-(
Les constatations que tu as faites sont normales :
- ms = 0 : trajectoire parfaite quand qu'il n'y a pas de perturbation de la masse d'air... ce qui n'existe évidemment pas en réel, mais n'est pas simulé (sinon, quelles valeurs de perturbation utiliser, alors qu'il en existe une infinité au cours d'un vol ?).
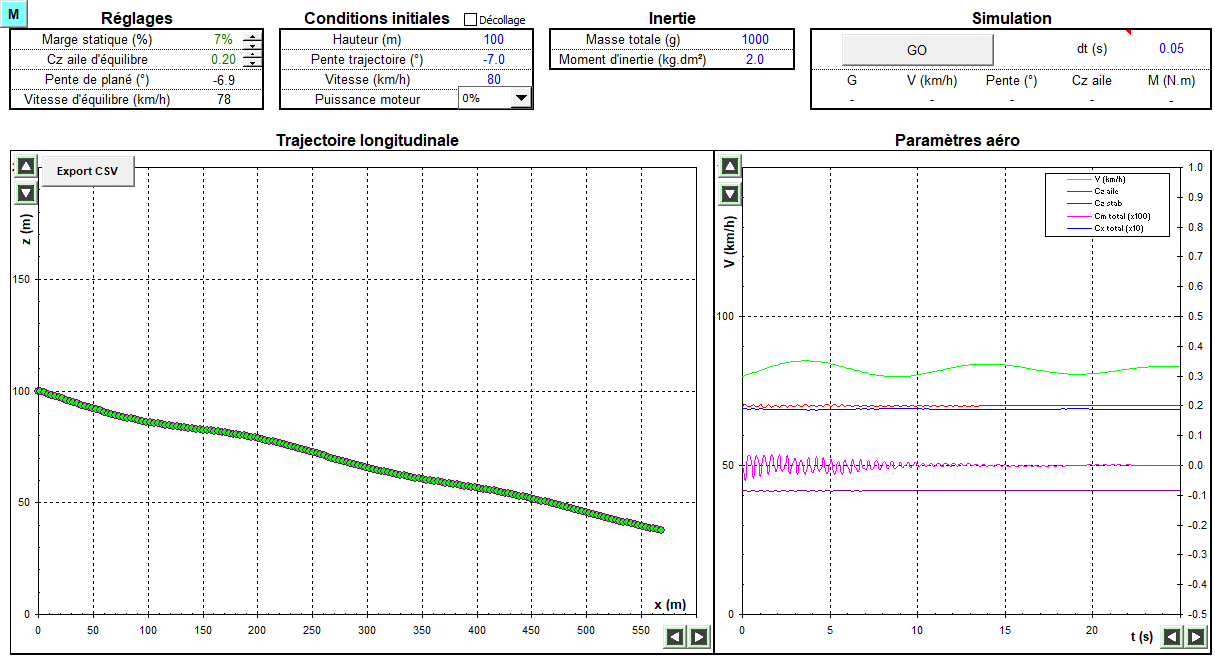
- plus ms augmente et plus on tend ici vers une trajectoire dynamiquement stable, mais pas forcément convergente : là aussi, c'est normal, les cas de stabilité dynamique "scolaire" [où il suffit de quelques oscillations pour que la trajectoire soit parfaite] ne sont pas la généralité sur nos modèles, sauf quelques cas particuliers, comme un faible moment d'inertie.Pour illustrer cela, j'ai pris l'avion exemple de PredimRC, volant en plané et en ne jouant que sur le moment d'inertie (d'abord très fort : la trajectoire diverge, puis très faible : la trajectoire converge) :
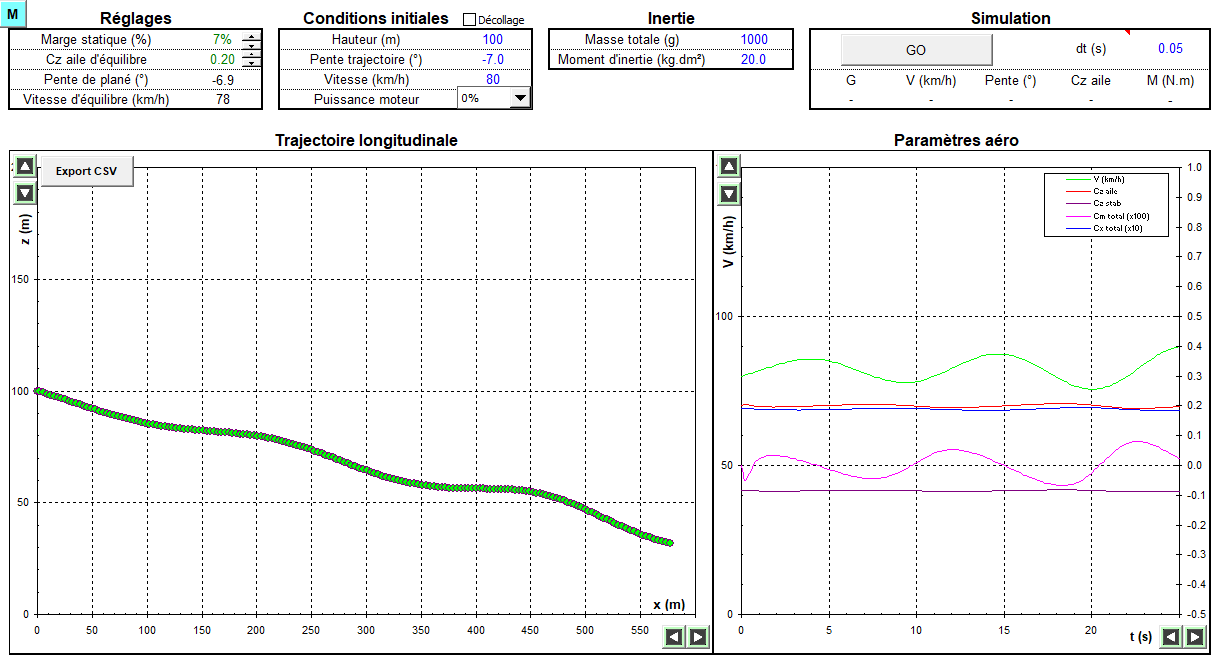
Il faut aussi rappeler que c'est une question d'échelle de temps. En effet, sauf là aussi cas particuliers, on laisse rarement voler un modèle seul pendant autant de temps et/ou autant de distance (1 min à 60 km/h, ça fait quand même 1 bon kilomètre... à moins d'avoir des yeux d'aigles ,-)
Par contre, si tel est le cas (FPV long range, vol thermique à grande distance), un gyro parfaitement réglé peut être un apport intéressant car il va rendre la trajectoire dynamiquement stable.Peut-être un élément factuel à rajouter à cet article ?
Franck
Mardi 5 Mai 2020 à 12:40 flip_Airboost
Bonjour Franck,
Je n'ai pas réussi à reproduire (sur Excel 2000 et 2013) le bug que tu décris pour les boutons de modification du Cz
d'équilibre et de la marge statique :-(
Elle se produit après que tu aies rentré une valeur en manuel avec la feuille déverrouillée. Ce n'est pas très grave.
Je la déverrouille pour avoir accès au calcul plomb de centrage et entrer des centièmes de Cz.
J'ai aussi essayé ton modèle avion.
Ensuite j'ai augmenté le volume de stab du BOT , mais ça divergeait toujours. Pour le moment d'inertie difficile de l'améliorer
à part changer toute la conception du modèle.
Je prendrais cette expérience en compte si je conçois un RES.
Merci pour l'apaisement de mes idées .
Je pense que l'on peut marquer ce sujet résolu.
Cordialement ,
Philippe
P.s. : J'avais des yeux d'aigle , il y a encore 4 ans j'envoyais mon planeur de 1.80m à 400m sans problème.
Aujourd'hui , j'arrête vers 250m ;o))
Mardi 5 Mai 2020 à 12:54 Franck.A
Elle se produit après que tu aies rentré une valeur en manuel avec la feuille déverrouillée. Ce n'est pas très grave.
Ok, c'est normal, en faisant ainsi tu écrases la formule dans la cellule, ce qui empêche ensuite le bouton +/- de fonctionner. Pour permettre ce que tu demandes, il faudrait que je mette des bouton ActiveX, et non des boutons simples, je vais y réfléchir pour la prochaine mise à jour.
Pour le moment d'inertie difficile de l'améliorer
C'est là la plus grosse difficulté, surtout avec les modèle motorisés où, fatalement, le moteur a un bras de levier important avec le CG.
Merci pour l'apaisement de mes idées .
Je connais ça aussi, avec une "petite" tendance à ne lâcher le morceau qu'une fois certain d'avoir tout pigé. Et parfois ce n'est pas immédiat...
Vous devez être membre pour poster un message.
|
|
|
|